PROGRAMACION DE ROBOTS INDUSTRIALES
Objetivo:
Programar robots industriales mediante lenguajes, entornos de programación y procesos de configuración, para su integración en procesos industriales.

Conceptos de clase 2
Programación guiada por computadora
rogramación de robots en el que se utilizan simulaciones por computadora para programar el robot sin tener que interactuar físicamente con él.
Programación en línea
Es la programación que se realiza directamente en el robot, usando herramientas como el Teach Pendant o interfaces en el controlador. El programador manipula físicamente el robot para guiarlo a través de las trayectorias deseadas y grabar puntos de referencia.
Programación fuera de línea
Es similar a la programación guiada por computadora. En este caso, la programación se realiza en un ordenador utilizando software de simulación y luego se transfiere al robot para su ejecución.
Robot Delta
Un tipo de robot paralelo que tiene tres brazos controlados independientemente conectados a una plataforma común. Los robots Delta son extremadamente rápidos y precisos, ideales para tareas de pick-and-place
Robot antropomórfico
Este tipo de robot tiene un diseño similar al de un brazo humano, con articulaciones rotacionales. Los robots antropomórficos suelen tener entre 4 y 6 grados de libertad, lo que les permite realizar una amplia gama de movimientos.
Robot SCARA
(Selective Compliance Articulated Robot Arm) tiene un brazo que permite movimientos rápidos y precisos en el plano horizontal, con cierta flexibilidad en el eje vertical
Cobot
Un cobot o robot colaborativo es un robot diseñado para trabajar de manera segura junto a los humanos en un entorno compartido.
Controlador
Es una unidad computacional que gestiona y supervisa todos los movimientos y acciones del robot.
Teach Pendant
Es una herramienta portátil que permite al operador controlar y programar un robot directamente. El Teach Pendant incluye botones y una pantalla para guiar al robot a través de posiciones deseadas y registrar los puntos clave de su trayecto.
Volumen de trabajo
El volumen de trabajo o área de trabajo de un robot es el espacio tridimensional dentro del cual el robot puede operar. Depende del diseño y los grados de libertad del robot. Conocer el volumen de trabajo es esencial para definir qué áreas puede alcanzar el robot durante la ejecución de sus tareas.
Grados de libertad
Representan la cantidad de movimientos independientes que puede realizar un robot en el espacio. Cada eje de rotación o de traslación añade un grado de libertad.
Tipos de robots en la universidad
SCARA
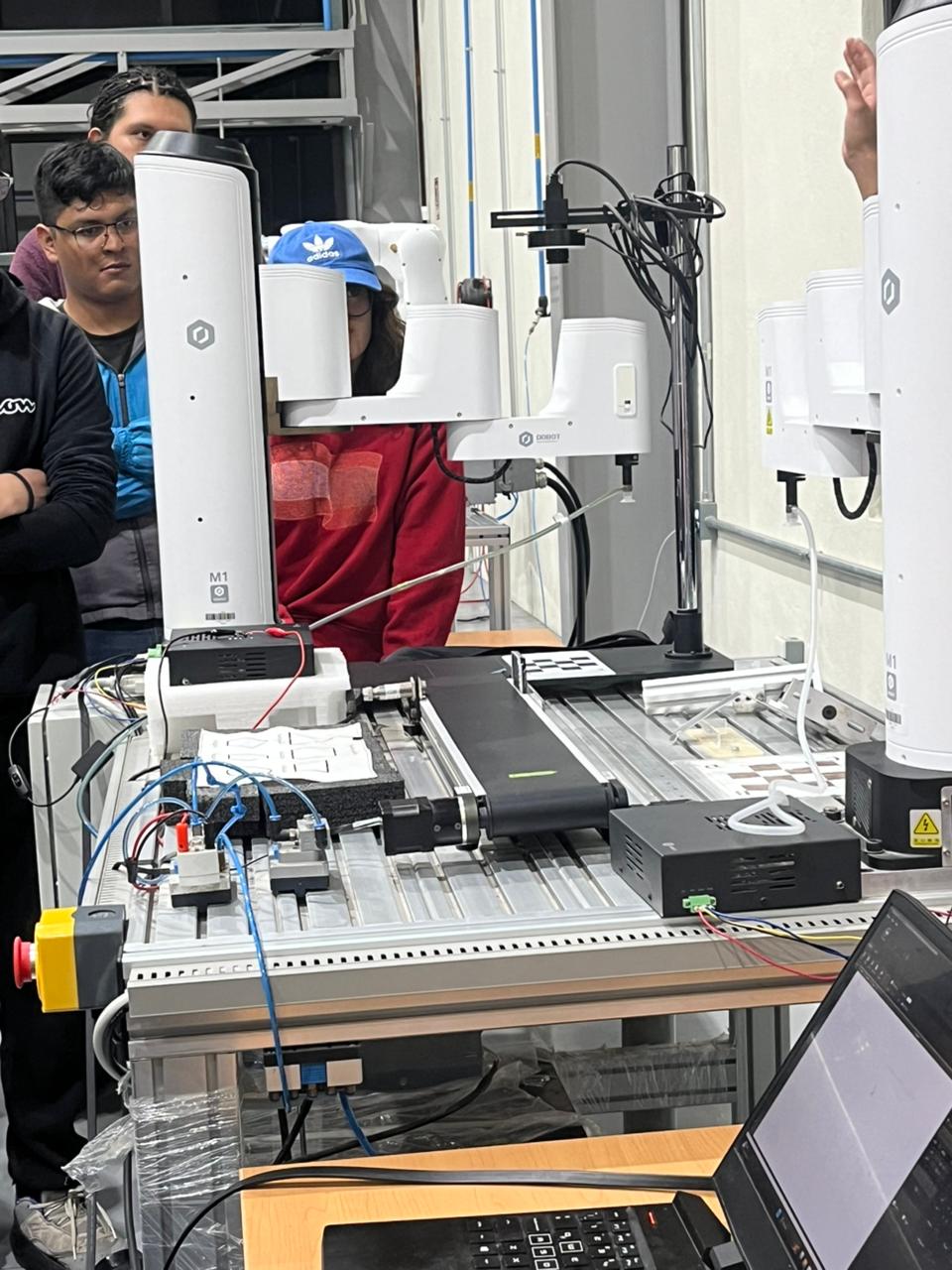
- El robot SCARA que tiene 4 ejes de movimiento y el efector final que en este caso es una ventosa además de que se usa el programa M1Studio
COBOT

- Un cobot el cual se controla por un Teach Pendant que por lo que entendí este trabaja de manera colaborativa con los humanos.
ANTROPOMORFICO
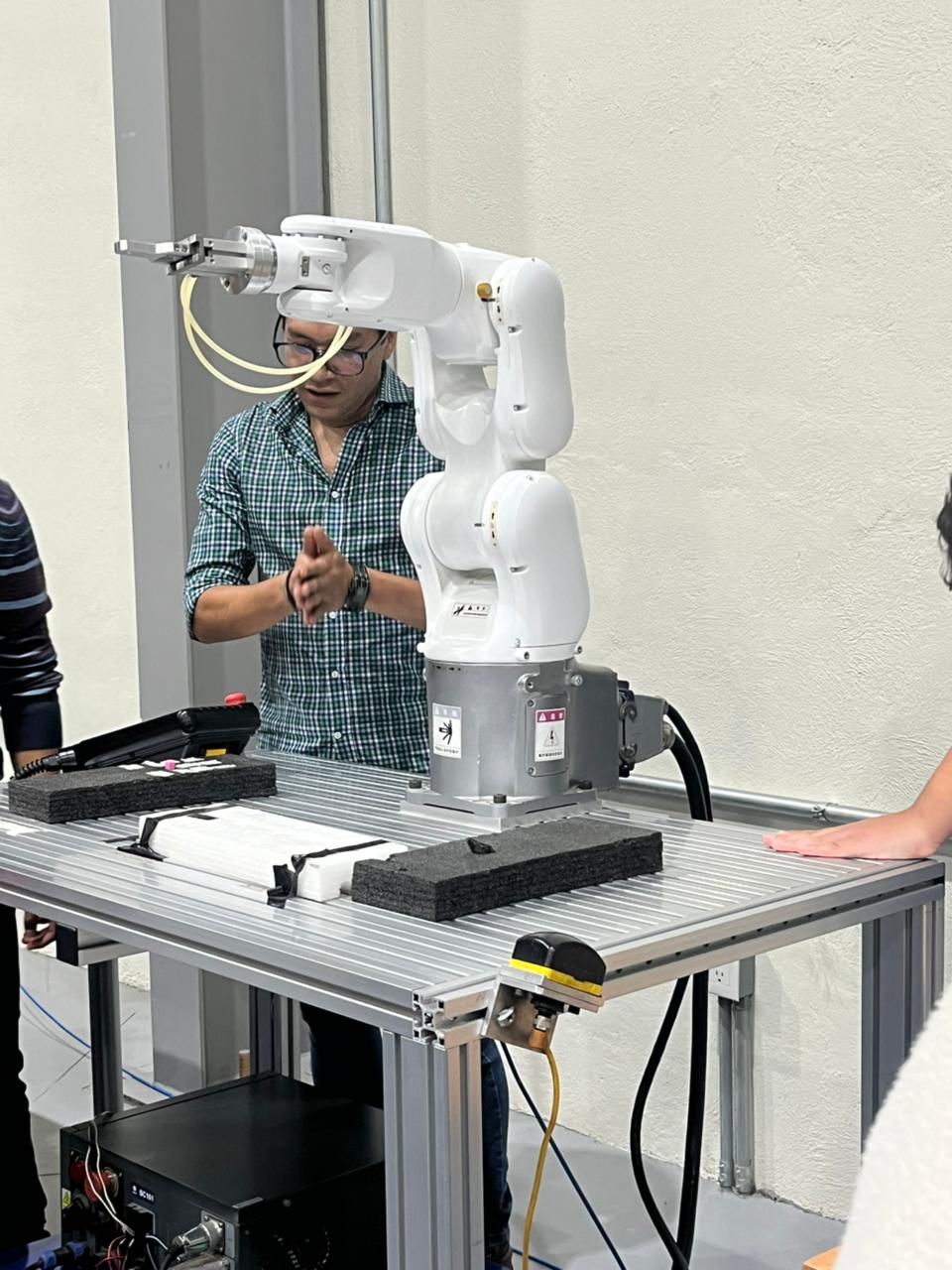
- El robot antropomórfico tiene 6 grados de libertad y su efector final es un gripper de igual manera se controla con un Teach Pendant.
Centro de mecanizado CNC

Arranque y apagado de robots industriales

Cobot:
- Para el arranque de un cobot primero se conecta a la alimentación de 110v luego giran las lleves, se encienda el Teach Pendant y se retiran los paros de emergencia. Luego dirigirse a la pantalla de inicialización, después en el botón de encender seguido de iniciar y en Ok, el siguiente paso es ir a la pestaña de mover se oprime a la mitad en botón físico del Teach Pendant y podemos empezar a mover el cobot. Para el apagado se colocan los paros de emergencia, se retiran las llaves y se desconecta de la alimentación.
SCARA:
- Para un robot SCARA primero se conecta a la alimentación, se retiran los paros de emergencia, se presiona el botón de encendido hasta que un led de color verde, para manipular el robot se conecta por medio de un USB, en la computadora se selecciona conectar, la velocidad tanto como la aceleración se bajan a 30 y se procede a mover el robot, para activar el efector final la cual es una ventosa la variable 17 debe estar a 24v y la variable 18 a 0v, para desactivar las variables se invierten es decir las 17 debe ir a 0v y la 18 a 24v. Para apagar se coloca el robot en su posición inicial, se deshace la conexión con la computadora, se colocan los paros de emergencia y el botón se presiona hasta que se apaguen los leds que están encendidos.
Robot antropomórfico:
- Para el robot antropomórfico este se conecta a la alimentación de 220v, se retira el paro de emergencia y se gira la perilla de encendido, luego se enciende el Teach Pendant se retira el botón de emergencia, este tiene una llave la cual, si esta girada a la derecha es modo automático y a la izquierda es modo manual, para manipular el robot debemos revisar que no haya ningún programa y podemos empezar a manipular el robot, para activar el efector final nos dirigimos a entradas y salidas, con la variable 1 se desactiva y con el 2 se activa, para apagar el robot debe regresar a su posición inicial se colocan los paros de emergencia, se apaga girando la perilla y desconectado de la alimentación.
Centro de mecanizado:
- Para el arranque del robot cartesiano reconozco que no comprendí mucho de cómo se manipula solo sé que para encender se gira la llave a 0, la perrilla se gira a ON y se conecta al aire, pero de ahí en fuera entendí como se mueven los ejes.
Robot Carteciano

Morfología, el área y el volumen de trabajo de diferentes tipos de robots:
- Cartesiano: Tiene tres ejes que se mueven linealmente (X, Y, Z). Su área de trabajo es similar a una caja rectangular.
- Cilíndrico: Se mueve a lo largo de un eje vertical y dos rotaciones. Su volumen de trabajo es un cilindro, permitiendo movimientos en altura y alrededor de un eje central.

- Polar: Combina un eje lineal con dos movimientos de rotación. Su volumen de trabajo es esférico, lo que le permite alcanzar objetos en un rango amplio desde su base.

- Antropomórfico: Simula un brazo humano con varios grados de libertad. Su área de trabajo es una esfera irregular, ya que puede moverse con gran flexibilidad en distintas direcciones.
- SCARA: Tiene dos ejes paralelos para movimientos horizontales y un eje vertical. Su área de trabajo es como un cilindro aplastado, ideal para tareas de ensamblaje rápidas y precisas.
Simulacion en RoboDK
Aprendí a reconocer los tipos de movimientos generales que puede realizar un robot industrial, como traslaciones, rotaciones y movimientos combinados. Practiqué el uso de software de simulación, como RoboDK, para programar robots de manera offline, sin necesidad de estar conectado físicamente a los robots concepto aprendido en la primera clase. Esto me introdujo al modo PTP (point-to-point), que permite definir movimientos precisos entre puntos previamente establecidos. Trabajé con diferentes robots industriales comprendiendo sus características y cómo sus movimientos se adaptan a diferentes tipos de tareas.
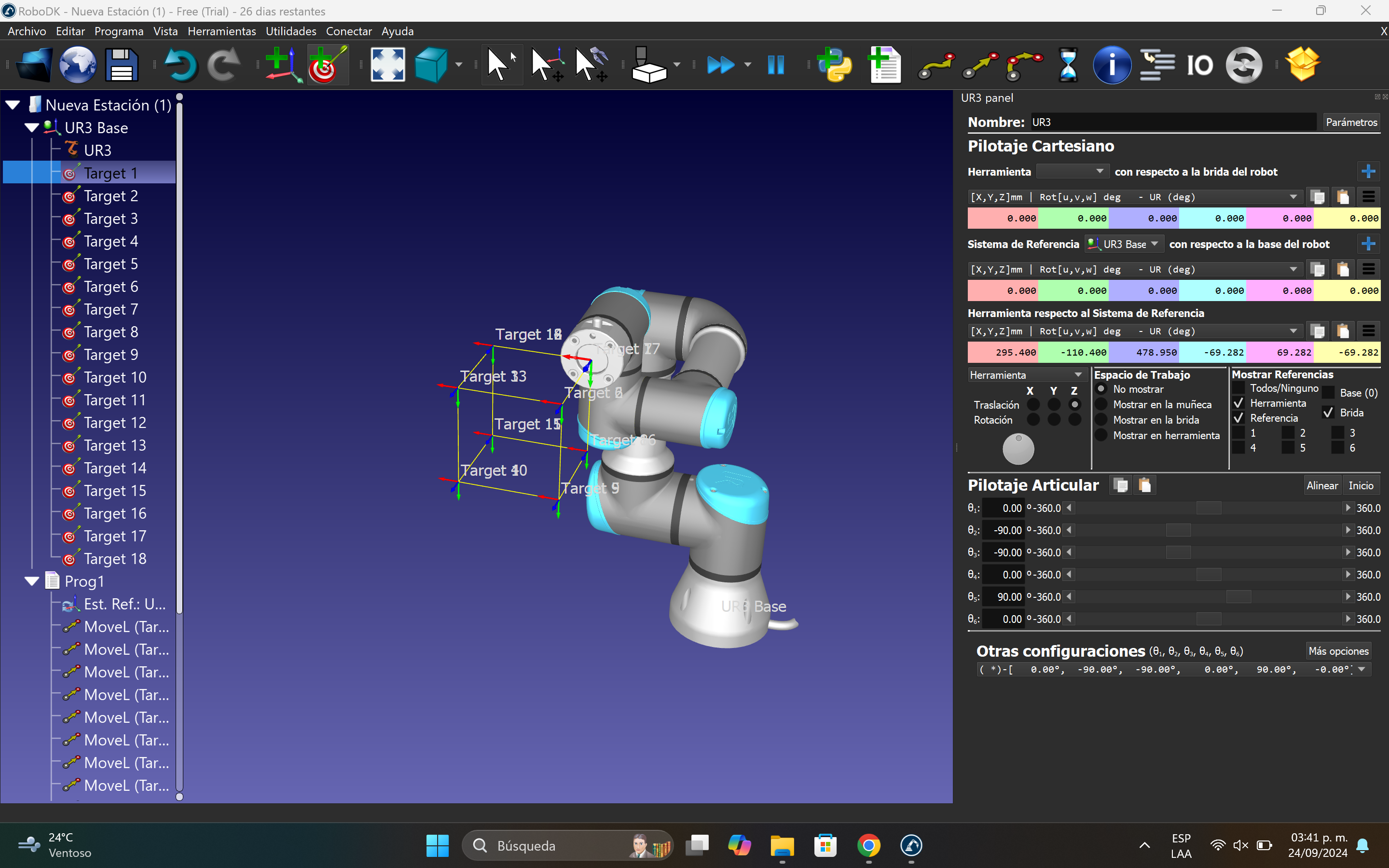
En esta imagen hice la simulación de como se debe mover un cobot para realizar un cubo fue difícil por a veces el programa se cerraba y él no se guardaba lo que ya había realizado, lo interesante es que después de que preestableces los puntos puedes definir como se moverá el robot para llegar a ese punto si va a ser un movimiento lineal o curvo, también indica si no es posible hacer algún movimiento.
La Inteligencia Artificial y el Aprendizaje Automático en Robots Industriales
1. ¿Qué es la Inteligencia Artificial en robótica industrial?
- Definición : La Inteligencia Artificial (IA) permite a los robots la toma de decisiones, el reconocimiento de patrones y la adaptación al cambio. En la robótica industrial, la IA ayuda a que los robots puedan "aprender" a partir de datos y experiencias previas.
1. ¿Qué es la Inteligencia Artificial en robótica industrial?
- Definición :En la robótica industrial, la IA ayuda a que los robots puedan "aprender" a partir de datos y experiencias previas.
- Beneficio : Esto significa que un robot puede mejorar en sus tareas con el tiempo, adaptarse a nuevas situaciones y realizar trabajos más complejos sin intervención constante de un operador humano.
2. Aplicaciones del aprendizaje automático en robots industriales
- Aprendizaje automático (Machine Learning) : Este campo de la IA permite que los robots analicen datos y mejoren su rendimiento en tareas específicas sin ser reprogramados manualmente para cada cambio.
- Ejemplos : En la industria, el aprendizaje automático permite a los robots ensamblar piezas que pueden variar ligeramente, realizar inspecciones visuales de calidad para detectar defectos y clasificar productos con mayor precisión.
3. Visión artificial y reconocimiento de objetos.
- Visión artificial : La visión artificial permite a los robots "ver" y analizar imágenes a través de cámaras y procesadores. Puede reconocer formas, tamaños, colores y patrones.
- Reconocimiento de objetos : Los robots con visión artificial y aprendizaje profundo pueden identificar y clasificar objetos con alta precisión.
4. Robots autónomos y la toma de decisiones

- Robots autónomos : Estos robots son capaces de tomar decisiones por sí mismos en tiempo real, gracias a la IA. Un ejemplo común en la industria son los vehículos guiados automatizados (AGV), que transportan materiales dentro de una fábrica, utilizan IA para analizar su entorno y decidir la mejor ruta, evadiendo obstáculos o eligiendo caminos alternativos.
5. Mantenimiento predictivo
- Qué es : El mantenimiento predictivo utiliza sensores e IA para monitorear el estado de los robots en tiempo real y predecir cuándo es probable que ocurran fallos. Los sensores recopilan datos de vibración, temperatura, velocidad, entre otros, y la IA analiza estos datos para identificar patrones inusuales que puedan indicar un problema inminente.
6. Robots colaborativos (cobots) con IA
- Qué son los cobots : Los robots colaborativos o cobots están diseñados para trabajar de manera segura junto a los humanos, sin necesidad de barreras físicas.
- IA en cobots : La IA permite que los cobots reconozcan los movimientos humanos y adapten sus acciones para garantizar la seguridad. Por ejemplo, si un humano se acerca demasiado, el cobot puede reducir su velocidad o detenerse.